
科研新突破:PAT3D技术实现图文转三维互动模拟
林谷颖是卡内基梅隆大学(CMU)的一名博士生,在李旻辰教授的指导下,他的论文已被 ICLR 2026 接收。研究团队还包括 CMU 的 Jun-Yan Zhu 教授、Michael Liu 和其他成员如高睿晗、陈瀚可等;香港大学(HKU)的 Taku Komura 教授和黄可蒙也参与其中,以及来自香港科技大学(HKUST)的刘缘教授。当前,3D AIGC 已能快速生成场景,但距离实际应用还有一定差
科技2 阅读
共找到 41 篇相关文章
林谷颖是卡内基梅隆大学(CMU)的一名博士生,在李旻辰教授的指导下,他的论文已被 ICLR 2026 接收。研究团队还包括 CMU 的 Jun-Yan Zhu 教授、Michael Liu 和其他成员如高睿晗、陈瀚可等;香港大学(HKU)的 Taku Komura 教授和黄可蒙也参与其中,以及来自香港科技大学(HKUST)的刘缘教授。当前,3D AIGC 已能快速生成场景,但距离实际应用还有一定差

xAI 最新发布了 Grok 4.3 版本,这是一次务实的产品改进:更经济、更快捷,并且更加实用。新版本没有大张旗鼓地宣传,甚至特斯拉 CEO 马斯克也没有为此单独发布推文。从这些情况来看,它更像是一个过渡性的更新。xAI 通过这次更新让模型进入 API 环境,同时降低了价格,并且增强了工具功能,方便开发者进行迁移工作。新版 Grok 在实际应用中更加务实:它不像之前那样强调 AGI 的宏大愿景或
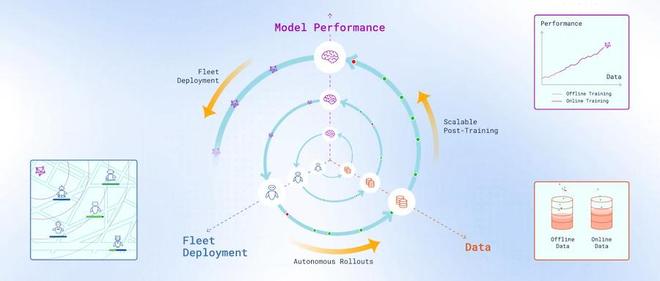
本文由一位专业的新闻编辑整理而成。当前,具身智能技术的发展遇到了一个明显的瓶颈:缺乏大规模的真实世界数据和经验积累。近年来,随着VLA等大型模型的出现,机器人在预训练阶段取得了显著的进步。然而,当它们进入实际应用场景时,问题便显现出来——由于物理世界的复杂性和多变性,机器人的性能难以持续改进,并且仍然高度依赖于人工标注的数据和重复的学习过程。这表明,具身智能还未达到“大规模增长”的关键阶段。实验室
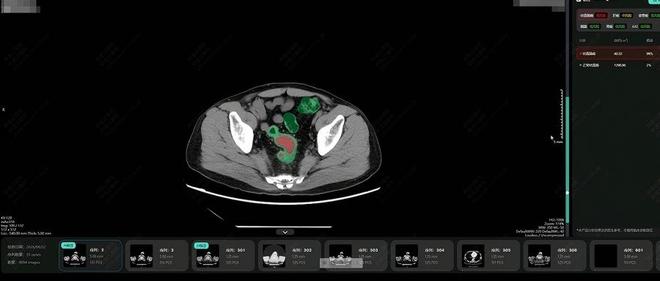
最近,阿里巴巴达摩院与广东省人民医院等单位合作开发了一种新型肠癌筛查人工智能(AI)系统DAMO COCA。该系统的相关研究成果已于4月21日在欧洲肿瘤内科学会的官方期刊《肿瘤学年鉴》上发表。这项研究在国际上首次提出了一种无需患者进行肠道准备就能完成机会性结直肠癌筛查的方法,使检查过程对患者来说更加舒适和便捷。该系统通过分析平扫CT影像,在实际应用中成功发现了5例之前被忽视的肠癌病例,从27433

新智元报道AI不再只是童年回忆中的游戏,而是成为了训练大模型的坚实平台:OpenRA-RL将即时战略游戏《红色警戒》改造为AI代理的训练场,并开源了多项关键技术。AI能自己打红警了。近期,Hugging Face推出了一个名为OpenRA-RL的新项目,它让经典RTS游戏成为大型语言模型训练的实际应用环境。这不是简单的演示或玩具级别的展示,而是具备基础设施级功能的真实工具。OpenRA-RL提供了

近日,在科技领域内备受关注的蚂蚁百灵,正式对外发布了 Ling-2.6-flash 大模型。这款拥有 104B 参数总量和 7.4B 激活参数量的新产品,以“Token 效率”为核心特色,能够提供更快、更经济且更加适合大规模实际应用的智能化服务。自匿名测试版“Elephant Alpha”在 OpenRouter 上线以来,仅一周时间便引起了业界的高度关注。上线后,“Elephant Alpha”

新阶段的Agent已经到来。作者|连冉当AI系统能够自主完成复杂项目的交付,且这种能力可以被重复利用和转化为技能时,是否意味着AI在职场中的作用发生了根本性的转变?OpenClaw 的热潮促使大模型竞争进入更深层面。现在评价标准已从“谁更强”转变为“谁能有效提升生产力”。Agent的实际应用、工程化适配以及长期运行的稳定性成为新的评判依据。然而,尽管顶级模型不断更新迭代,大多数产品依然停留在生成单

最近,云深处科技与浙江省应急管理厅合作推出了一款名为“AI防汛勇士”的具身智能装备,并在杭州市余杭区径山镇水车坞进行了一场地质灾害隐患排查的直播演示。这是全国首个专为防汛防台场景设计的具身智能机器人。“AI防汛勇士”也是首款用于基层地区防汛巡查的实际应用设备。该机器人的移动平台基于云深处科技研发的“山猫M20”轮足机器人,配备有大模型和车载系统,并安装了双光谱吊舱、5G模块以及边缘算力盒等装置。它

4月13日,第六届中国国际消费品博览会在海口市拉开帷幕。展会现场集中展示了多种智能机器人,凭借其尖端科技和新颖应用吸引了众多参观者的目光,他们纷纷停下脚步观看并亲身体验这些机器人的功能。其中一台机器人正用毛笔书写“福”字。4月13日,第六届中国国际消费品博览会在海口市举行。展会中展示的智能机器人凭借其创新科技和实际应用吸引了大量观众的兴趣,并与他们进行了互动体验。例如宇树科技的人形机器人就与参观者

国产机器人公司宇树科技近日在其社交媒体平台上发布了一段视频,展示其研发的人形机器人H1达到了惊人的奔跑速度——10米/秒,刷新了人形机器人的世界纪录。《环球时报》的专家在接受采访时指出,这一技术突破不仅提升了机器人的奔跑能力,在实际应用中也能转化为更高效的作业表现。视频画面显示,宇树科技的人形机器人H1在田径场上快速奔跑,步伐频率极高。根据公司介绍,这款机器人身高0.8米、重约62公斤,“跑出了世
智东西编辑|三北开年伊始,开源AI代理框架OpenClaw在全球范围内迅速走红。它就像一只不知疲倦的“龙虾”,具备记忆功能、操作能力和低门槛的特点,让许多用户第一次直观地感受到人工智能的实际应用价值。然而,当企业从最初的小规模尝试转向大规模部署时,问题也随之而来。这些代理能力强却未经充分训练,在企业的基础设施上7×24小时自主运行,带来了失控的风险:记忆丢失、密钥泄露、脚本失控以及预算超标等问题层

4月11日,在一场关于智能电动汽车发展的高端论坛上,滴滴出行的联合创始人兼自动驾驶公司首席执行官张博发言称,该公司目前在全球范围内服务于超过5000万的日活跃用户,并已在包括中国在内的14个国家提供乘车服务。他强调了这一大规模的服务场景为推动自动驾驶技术的实际应用提供了理想环境。在具体实施策略上,滴滴创新性地引入了一种混合派单机制:当乘客在平台上输入行程的起点和终点后,系统会根据当前的技术能力和相

在2026年,人工智能的发展正以前所未有的速度改变着技术的边界。大型模型训练效率不断提高、具身智能从实验室走向实际应用的步伐加快以及多模态融合技术逐渐成熟等一系列进展描绘了当前最令人振奋的人工智能发展图景。与此同时,代理技术(Agent)的进步正在重新定义人机协作的可能性,并引发了关于如何使这些智能体具备持续学习和自主决策能力的研究热潮。在这样一个背景下,一年一度的 ICLR 成为了观察全球人工智

4月9日,腾讯云发布了QClaw V2的新版本(V0.2.5),旨在解决AI在实际应用中面临的记忆不足、回复混乱、难以协同工作和安全隐患等问题,并带来了多项关键功能的提升。其中一个亮点是多Agent并行处理机制。用户现在可以同时启动多达三个Agent,让它们分工协作,独立作业,互不干扰,从而大大缩短了任务完成时间。为了应对跨应用操作时出现的数据断层问题,QClaw V2版本推出了智能连接器功能。在
ReCALL团队在量子位平台上发布了一篇文章,探讨了生成式模型的应用效果。当多模态大模型具备强大的视觉和逻辑推理能力时,人们期待它们能轻松解决图像检索任务,尤其是组合图像检索问题。然而实际应用中却发现,将这些大型生成式模型改造为判别式的检索工具后,其性能反而显著下降。这种从生成转向判断的转换过程中产生了严重的功能退化现象。最近,紫东太初团队与新加坡国立大学的研究人员合作解决了这一行业难题,并提出了
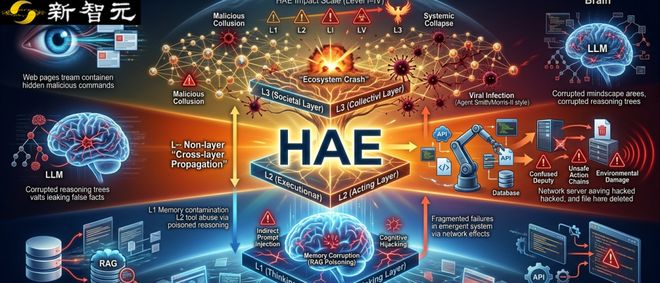
新智元报道当人工智能从被动预测的工具转变为主动决策的实体时,其面临的安全挑战也在经历一场前所未有的变化。在医疗诊断、金融交易和工业控制等高风险领域部署AI系统后,安全问题已经不再是事后修补的问题,而是决定系统能否顺利运行的关键因素之一。目前针对智能体安全性研究的现状存在结构性缺陷:现有的调研往往只关注数据处理到模型训练再到实际应用这一静态过程中的某个环节,或者是将安全、隐私和鲁棒性等特性孤立开来考
最近,理想公司发布了一项新的技术突破——一款结合了流式视频理解和具身智能的新型Agent框架StreamingClaw。该系统不再像传统的“龙虾”那样只是盯着屏幕玩电脑,在实际应用中已经能够主动介入用户的生活与工作场景之中。StreamingClaw在确保兼容OpenClaw的基础上,新增了实时多模态流式交互的支持功能。这种改进使得系统可以像人类一样,在接收到视觉输入时即时进行处理并生成反馈。例如
在今天的讨论中,我们探讨了特赞新推出的企业级 AI 应用——GEA(General Enterprise Agent)。GEA 是一款基于大语言模型的企业级智能应用平台,旨在帮助企业实现自动化和智能化的业务流程。作者|周永亮我们首先回顾了特赞的发展历程及其在企业服务领域的成就。随后,我们重点讨论了 GEA 的设计理念、核心功能以及它为企业带来的价值。通过结合实际应用场景,如社交媒体管理与客户分析,

4月1日,全球领先的自动驾驶科技企业文远知行WeRide联手东南亚超级应用Grab,在新加坡的榜鹅地区开启了Ai.R自动驾驶出行服务的公测阶段。据悉,这一服务在启动前经历了大量的社区沟通和测试。自今年一月以来,超过一千名乘客已经参与了试乘活动,并提供了宝贵的反馈意见,帮助提升了服务质量。到目前为止,Ai.R车队的安全行驶里程已突破三万公里。在推动自动驾驶技术的实际应用过程中,文远知行与Grab也特
今日上午,国际汽联正式宣布,经国际汽联、F1车队及动力单元供应商多方协商后,一致决定将本周在日本举行的排位赛中允许的最大能量回收量从9.0兆焦调整为8.0兆焦。 选择8.0兆焦的调整并非偶然。在本赛季的前两站比赛——澳大利亚站和中国站——排位赛中,能量回收上限同样设定为9.0兆焦。通过这两站积累的实际赛道数据,FIA与制造商们发现,9.0兆焦的上限在实际应用中未能完全实现“保持排位赛作为性能挑战”