高德公司近期发布了全球首个为通用人工智能设计的全栈技术框架“ABot”,该系统包括多项行业领先的技术成果。
 量子位的朋友们
量子位的朋友们这一全新体系旨在推动具身智能的发展,构建面向AGI的技术平台。
今年四月,在北京亦庄举行的机器人半程马拉松活动中,高德推出了全球首款开放环境下的全自主导航四足机器人“高德途途”。这款机器人在复杂环境中成功协助视障人士完成障碍物规避和人群穿行等挑战,标志着实验室技术向实际应用的重要突破。

“高德途途”的核心能力源自于ABot全栈具身智能系统。该体系基于海量的真实场景数据以及多模态的训练资源,高效地转化为机器人执行任务所需的智能化资产,实现了从AGI概念到实践的重大进展。
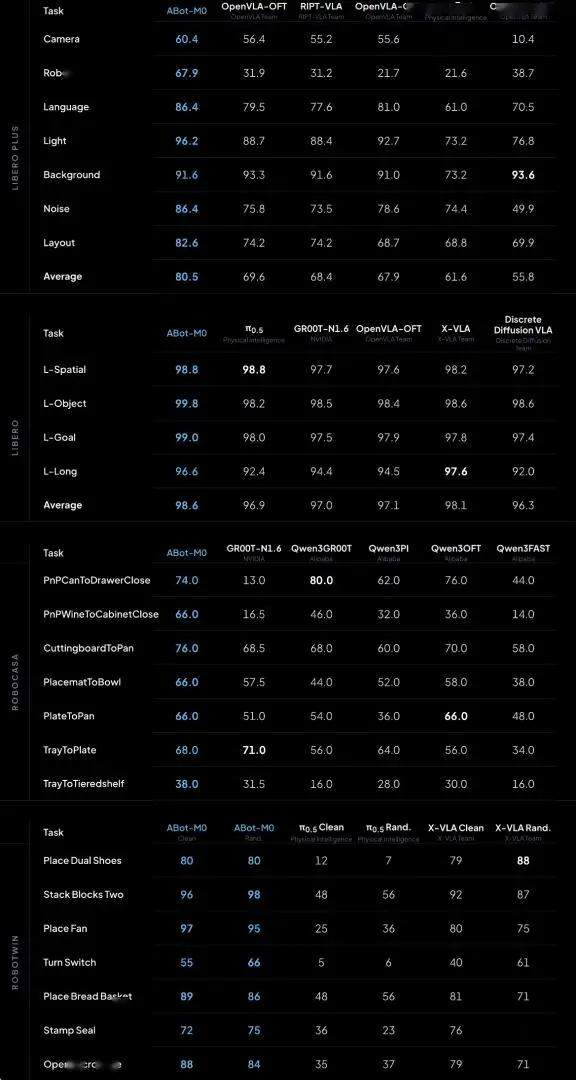
ABot技术框架在架构设计上超越了传统的零散路径,首次将数据引擎、基础模型与操作中枢紧密结合,形成一个完整的系统。目前,ABot系列已经在15项全球权威基准测试中取得了最佳成绩。
通过“三层飞轮式”设计理念,ABot体系构建了一个持续进化的闭环生态系统。
ABot框架包括数据层、模型层和应用层三个层次,每一层都相互关联并驱动整个系统的进化。这一设计能够精准解决行业内存在的数据稀缺、仿真差距以及技能泛化等问题。

在具身智能领域中,数据扮演着至关重要的角色,直接影响到其适应性和灵活性的边界。
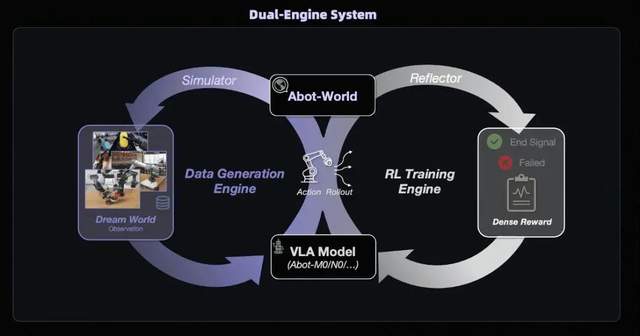
ABot-World是ABot体系中的关键组成部分,它通过合成不同类型的训练数据并使用强化学习引擎,在虚拟环境中定义奖惩机制来优化模型性能。这不仅降低了真实机器采集数据的成本,还解决了仿真与现实之间的差距问题。
在具身智能的操作性和导航能力方面,ABot-M和ABot-N两个核心模块分别负责执行任务的动作控制以及路径规划,通过组合调用实现复杂的长距离任务处理。
ABot-Claw作为应用层的关键部分,采用了“地图即记忆”的设计理念来协调不同形态的机器人工作,并提供统一的认知框架,解决了跨机器和场景的知识共享难题。
高德的空间智能飞轮是ABot体系设计的基础,它利用大量实际使用中的时空数据进行模型迭代优化,推动了对物理世界的理解不断深入。
ABot-World在物理一致性、动作控制性和零样本泛化能力等关键指标上达到了全球领先水平。
与其他世界模型相比,ABot-World率先实现了将物理定律嵌入到生成流程中,成为首个可微分且能够进化的动力学引擎。这一创新直接支撑了虚拟训练与实际部署之间的无缝转换。
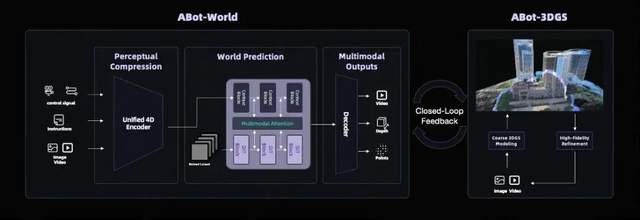
在架构设计上,ABot-World采用了专为具身智能定制的14B DiT结构,通过输入观察和动作来生成符合时空规律的状态序列,同时结合大规模真实数据进行多级采样治理,提高了泛化能力。
场景构建过程中,3DGS冷启动技术可以将手机拍摄或航测图等稀疏信息转换成高质量的三维场景,大大降低了数据采集的成本。
在模型训练方面,ABot-World首创了Diffusion-DPO框架来对物理规则进行独立判断,并通过生成符合实际物理特性的样本序列来进行优化,确保每一帧画面都具有高保真的属性特征。
ABot-World利用自有地图与匿名化数据结合3DGS技术实现了厘米级重建和光照一致性的目标,构建了大规模的真实场景库及推理训练轨迹数据库,并通过VLA闭环持续进化模型。
在多个权威评测中,ABot-World的表现始终处于领先地位,在物理一致性、动作控制性以及零样本泛化等方面均达到最优水平。

ABot-N和ABot-M是整个体系中的两大核心模块,分别负责导航与操作任务的执行,并在全球范围内率先实现了跨形态适配及任务场景下的技术突破。
作为“运行大脑”的ABot全栈体系中,“运动双核”ABot-N和ABot-M承担着机器人行动指令的基础响应职责。通过统一架构设计,高德开发出了高效的导航与操作模型,大大提高了跨形态适应性和任务泛化能力。
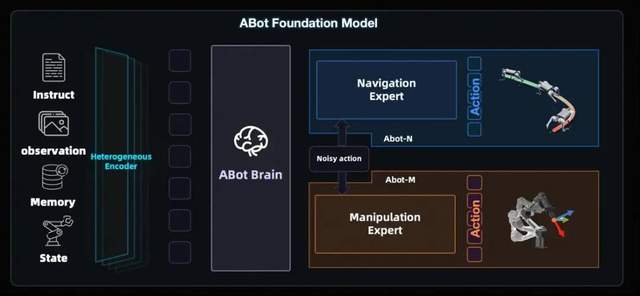
ABot-N是一个具备意图理解、自主决策及持续进化功能的VLA基座模型,能够独立完成多项核心导航任务,在性能上超越了传统专用架构的限制。
自ABot-N发布以来,在多个权威基准测试中均取得了领先成绩,并在导航精度、社会合规性以及零样本泛化能力等方面表现出色。
ABot-M是全球首个统一架构的操作基座模型,能够适应多种形态的机器人执行复杂任务,显著提升了操作模型的泛化性和鲁棒性。
该模型提出了流形学习的概念,并通过双流并行感知架构提高了动作生成的精度和效率,在高自由度控制等领域展现了强大的扩展能力。
在多个主流评测中,ABot-M在泛化性、鲁棒性和跨形态迁移等方面均取得了卓越的成绩,超越了现有的多项基准模型。
ABot-N与ABot-M的研究成果被ICLR和CVPR等国际顶级会议收录,并为精确高效的机器人导航操作提供了范例参考。
作为“执行中枢”,ABot-Claw首创的Map as Memory理念重新定义了具身智能的记忆机制,采用集中式架构将地图数据与多模态感知信息统一映射到共享语义空间中。
具体而言,“视野之外即荒原”的传统机器视觉限制已被打破,新型方案支持新设备快速接入并继承环境认知功能,实现了跨场景的认知无缝衔接。
ABot-Claw采用云端大脑与边缘响应的两层结构设计,在智能深度和执行可靠性之间找到了平衡,并提供了多机器人协同作业的支持。
此外,ABot-Claw还创新性地引入了闭环反馈机制来提高复杂场景下的鲁棒性和泛化能力。
伴随高德途途的全球首次亮相,高德计划将整个ABot技术体系开源发布,这不仅体现了“AMAP AI Inside”的核心理念,还将推动具身智能研发范式的变革,加速通用人工智能时代的到来。
伴随高德途途的全球首秀,高德同步宣布将开源ABot全体系,此举不仅是对“AMAP AI Inside”核心理念的深度践行,更将重塑具身智能的研发范式,加速AGI时代的全面到来。