复旦大学迎来了一位重要的学者——苏昊,这位曾在美国长期工作的教授回到中国任教。
 克雷西
克雷西他将致力于推动“物理智能”的发展。
苏昊是ImageNet的主要创建者之一,并在具身智能领域拥有极高的学术影响力。
具身智能领域的顶尖华人科学家苏昊,在最近的第五届中国三维视觉大会上正式宣布加盟复旦大学。
此次回归,他将以浩清特聘教授的身份加入学校,并领导新成立的通用物理智能研究院,担任院长一职。
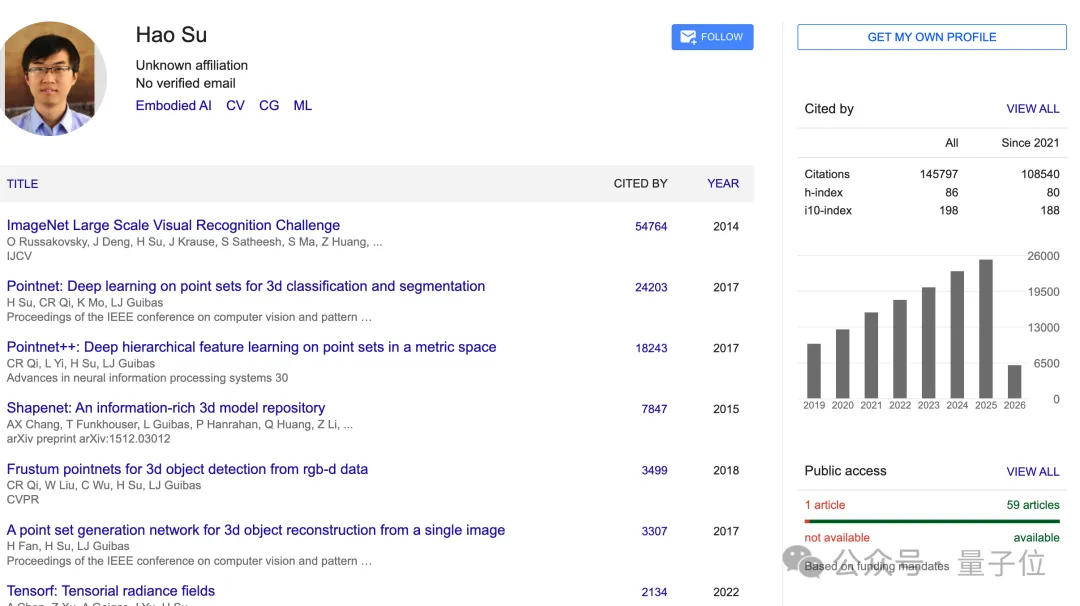
苏昊在具身智能领域拥有超过14万次的谷歌学术引用量,在同领域中排名首位。
在加盟复旦之前,他曾是美国加州大学圣地亚哥分校计算机科学与工程系的一名副教授,并领导该学校的具身智能实验室。
此前有关苏昊即将回国任教的消息已经在国内外高校间流传开来,如今终于得到了证实。
苏昊不仅在学术界享有盛誉,在业界也是一位领军人物。他还是Hillbot公司的联合创始人兼首席技术官。
谁是苏昊?
2008年到2009年间,苏昊先后参与了普林斯顿大学和斯坦福大学的ImageNet项目,并从此开始专注于计算机视觉领域的研究。
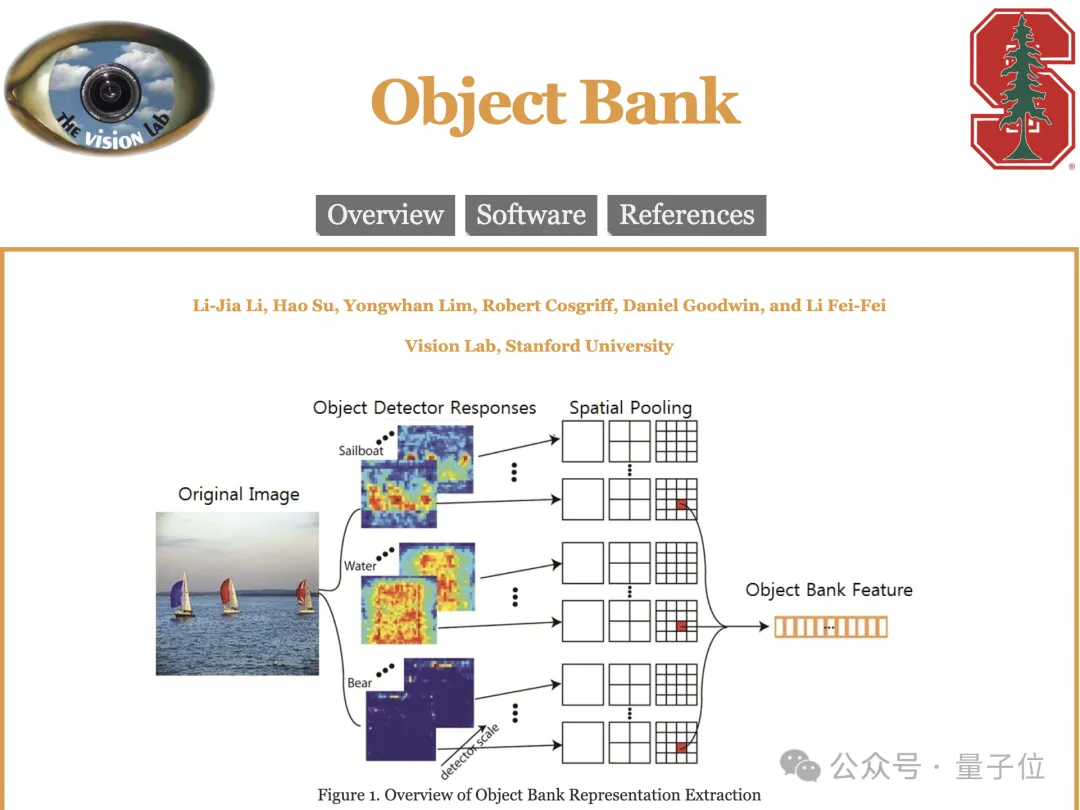
ImageNet数据集对近二十年的人工智能发展起到了重要的推动作用。之后他又与李佳合作开发了Object Bank,提升了图像在高层视觉任务中的表现能力。
从那时起,苏昊的研究重心转向三维感知领域,并于2015年发布了ShapeNet——全球首个大规模3D数据集。
ShapeNet的发布标志着3D视觉研究进入了黄金时期。随后他又陆续推出了PointNet和PartNet等重要成果。
PointNet是第一个可以直接处理点云数据的深度学习模型,而PartNet则包含了一系列三维物体的数据集。
2018年获得斯坦福大学计算机博士学位后,苏昊发布了SAPIEN——全球首个以可泛化操作为核心的模拟器,并随后在ICCV上发起了相关工作坊。
苏昊的学生们包括弋力、卢策吾和王鹤等知名学者。
回顾过去,他从北航高等理工学院开始自己的学术生涯,在美国顶尖学府深造并最终投身创业。
2005年,经李未教授推荐,苏昊前往微软亚洲研究院实习,并在此期间接触到了计算机视觉领域。
在斯坦福大学攻读博士期间,他跟随李飞飞教授深入研究图像识别和场景分类等课题。
苏昊表示加盟复旦是出于共同推动“物理智能”的愿景。他认为这不仅是技术问题,还涉及到多学科的融合与产业生态的发展。
通用物理智能研究院将打破传统院系壁垒,汇聚数学、物理等多个领域的顶尖人才,致力于培养未来的AI领军人物。
苏昊认为人才培养的关键在于科研视野和长期探索的决心。他强调论文只是研究过程中的副产品,真正的目标是在现实世界中实现有效的智能体行为。
他还计划改革课程体系,让学生能够更早地接触前沿科研与实践,同时鼓励师生创新创业,加速技术成果转化。
尽管苏昊对具身智能赛道持乐观态度,但他也提醒人们需要谨慎看待当前的技术进展和未来发展的潜力。
他指出填补现有技术和真正通用能力之间的差距是关键挑战之一。物理智能的研究正是解决这一问题的核心。
3D视觉的奠基人
苏昊预测,在长期视角下,具身智能将广泛应用于制造业、服务业等多个领域,并推动人类进入一个新的时代——人机正面互动的时代。
他相信,复旦大学在AI和具身智能领域的研究将引领全球前沿趋势。
2015年,他发布ShapeNet——全球第一个大规模3D数据集,包含逾300万个3D CAD模型,涵盖3135个类别,被外界誉为“3D领域的ImageNet”。

ShapeNet发布后,3D视觉研究随即进入黄金发展期。
2017年,PointNet与PointNet++相继发布,让3D视觉相关论文在顶会的占比从不足10%跃升至70%。
其中PointNet是首个直接处理原始点云数据的深度学习模型,而PointNet++则进一步捕捉点云中的局部结构信息。
这两项工作,如今已广泛应用于自动驾驶系统。

2018年获得斯坦福计算机博士后,苏昊又发布了3D物体数据集PartNet,并入职加州大学圣地亚哥分校。
从视觉到具身
感知之后,苏昊的下一个问题是,能不能把具体的感知算法整合进一个更大的系统?
这一思考,驱动他从计算机视觉迁移到机器人研究。
2020年,他基于PartNet发布了全球第一个以可泛化操作为核心的模拟器——SAPIEN(命名灵感来自《人类简史》中的“智人”),为机器人视觉与交互任务的研究搭建了关键基础设施。
2021年,他又在此基础上推出ManiSkill机器人操作仿真平台,用于测试和训练机器人操作技能。
同年ICCV,苏昊发起workshop,聚焦基于物理的建模与仿真、基于学习的仿真、人体仿真到具身视觉和机器人学习等广泛主题。

这些成果,也延续到了苏昊创办的具身智能公司Hillbot上。
2024年,苏昊加入了具身智能的创业浪潮,创办了Hillbot,并担任首席技术官。

Hillbot旗下拥有的两张王牌,正是苏昊此前发布的SAPIEN仿真器及ManiSkill训练平台,主打模拟与3D生成。
另外,Hillbot已与英伟达合作,借助Nvidia Cosmos平台生成高仿真视频训练数据。
产品方面,Hillbot推出了轮式机器人Hillbot Alpha,基于仿真训练,主要用于复杂环境下的移动操纵任务,如零售店、咖啡馆和制造车间等。

为什么选择复旦?
对于加盟复旦这个选择,苏昊给出了简洁而坚定的解释:
因为复旦要做的事,与我要做的事,是同一件事。
那件事,指的便是推动“物理智能”的最终实现。
所谓物理智能,是让AI系统在物理世界中有效完成任务——既能理解这个世界,也能执行恰当的行动。
在苏昊看来,这不仅是算法问题,更涉及机器人实体、多学科交融,以及一个完善的产业生态。
他看中复旦的理由具体而落地,复旦拥有深厚的数学、物理学科根基,积极推进的新工科建设,以及地处上海和长三角中心的产业与区位优势。

以此为目标,加盟复旦后,苏昊将领衔建设通用物理智能研究院。
该学院依托复旦大学智能机器人与先进制造创新学院,打破传统院系划分,不设学科边界,完全围绕问题导向,汇聚数学、物理、计算机、人机交互、脑机接口等多领域顶尖人才。
他直言,研究院的目标是培养未来5到10年的人工智能领军人物。
在人才培养理念上,他强调两点——高品位的科研眼光(知道什么问题值得做)和长周期的探索耐心(愿意把问题做完)。
论文不是目标,而是副产品。真正的标尺,是能否在真实世界中实现智能体的有效行动与自主决策。
研究院将重构课程体系,缩短从基础到前沿的路径,让学生尽早进入科研与实践,同时大力支持师生创新创业,推动成果转化。
具身智能:乐观,但谨慎
对于当下火热的具身智能赛道,苏昊的判断是“谨慎的乐观”。
乐观的底气来自问题本身,因为这是一个既有科学深度、又有巨大产业潜力的真问题。
谨慎则来自于现实,因为当前涌现出的大量精彩演示,与真正的通用能力之间,仍存在关键断层。
而填补这一断层的核心,正是物理智能。

谈到“具身智能的ChatGPT时刻”,苏昊坦言,短期内实现大语言模型那种程度的泛化还不现实,但在更长时间尺度上,方向是清晰的。
他预见,具身智能将深度渗透制造业、服务业、养老行业等领域,最终推动人类走向“人机正面互动、人机共存的时代”。
而通往那一未来的桥梁,正建立在今天对物理智能的扎实探索之上。
苏昊从中国出发,一路从2D到3D,从视觉到具身,一步步打通“让机器理解世界”的关键路径。
如今,他带着这一切回来了——落脚复旦,直面物理智能这道真正的难题。
世界级AI科学家的加盟,也把复旦在AI和具身智能,推向了世界最前沿。
参考链接:
[1]https://mp.weixin.qq.com/s/sv768xtTCHv6Uy9qbD92EA
[2]https://www.haosu.ai/