全球最大的含触觉数据集有何魅力令谷歌等知名企业及众多高校纷纷加入?
 量子位的朋友们
量子位的朋友们戴盟机器人携手包括 Google DeepMind、中国移动、新加坡国立大学、香港科技大学、北京大学和清华大学在内的多家全球顶尖学术机构与企业,共同推出了全球规模最大的综合性物理世界数据集 Daimon Infinity。
近来,具身数据集的领域热度不断攀升,连谷歌旗下的DeepMind也开始涉足这一赛道了吗?
戴盟机器人联合多家知名企业和高校,在今年四月十五日发布了全球规模最大、涵盖触觉等多维度信息的全模态物理世界数据库 Daimon Infinity。

众多机构共同参与建设
数据量有望在年内达到数百万小时,内容覆盖多种真实场景,并包含视觉、语音文本、动作轨迹等多个方面。据称使用该数据集训练模型可使效率提升十倍。其中一万个小时的数据已公开免费提供,并被放置于阿里魔搭社区的首页。
从国家战略层面到资本市场的关注,都凸显了数据在具身智能行业中的重要性。只有填补数据缺口,才能克服当前智能化技术难以落地应用的问题。这也是众多顶尖机构联手建立高质量数据库的主要动因——通过构建大规模数据集,加速推动具身智能向通用时代迈进。
从拆解Daimon Infinity的过程中可以看出,其能够吸引头部企业加入的原因包括物理交互、真实场景和持续的数据生成能力等几个关键因素。
【物理接触已成为具身智能的关键要素】
触觉是 Daimon Infinity 的核心特性之一。作为提出 VTLA 架构的先驱者,戴盟首次将触觉感知引入了机器人数据的核心领域。
以往的具身智能化主要依赖视觉传感器,但这种方式可能因遮挡或光线不足而失效。与远距离观察不同,触觉为机器提供了直接的物理反馈,有效弥补了视觉盲点和错误判断的问题。曾经被视为高端配置的触觉技术,如今已经成为了实现精准操作不可或缺的一部分。
多家顶尖机构选择与戴盟合作建设 Daimon-Infinity 数据集,进一步证明了行业对将触觉感知纳入核心数据路线的认可度。
这一战略能够得以实施,得益于戴盟在触觉感知技术方面的领先地位。Daimon-Infinity 提供的触觉数据不仅限于接触力的信息,还包括物体材质、软硬程度等多样化的模态信息,完整记录了真实的物理互动过程。
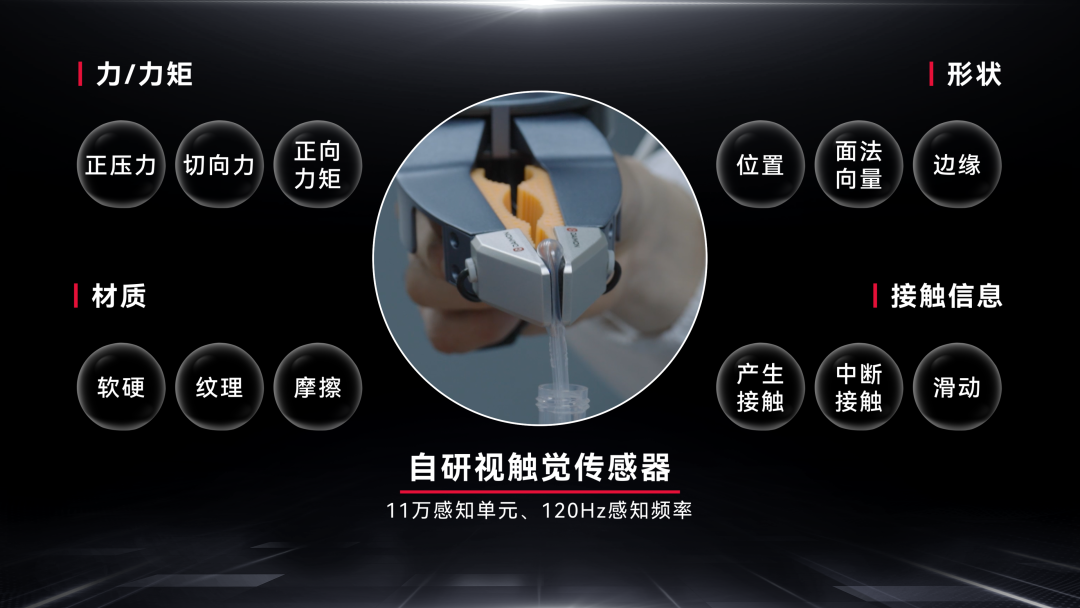
Daimon-Infinity 能够填补行业中的触觉数据空白,这主要归功于团队的技术背景。戴盟起源于香港科技大学,由机器人研究院院长王煜和其学生段江哗共同创立。团队通过先进的视触技术壁垒,将复杂的触觉信息转化为图像形式,大大降低了具身模型的学习难度。
触觉的引入显著提高了数据的有效性:测试结果显示,在精细操作任务中,使用 Daimon-Infinity 数据集进行预训练只需十分之一的数据量即可实现更好的效果,从而将训练效率提升了十倍之多。
【真实场景,海量生产】
真实场景的采集是 Daimon Infinity 的另一个重要特点,这是由于其独特的数据收集方法决定的。
过去的数据收集往往局限在封闭的工作场所内,成本高昂且环境单一、标准化程度高,这导致了大量重复数据的存在,并无法满足机器人在现实复杂环境中稳定运行的需求。
为了克服这一问题,戴盟建立了全球最大的外发式数据采集网络,通过自主研发的轻便型采集设备,在户外和家庭等非标准环境下进行真实的操作记录。这种模式不仅打破了产能限制,还能够收集到多样化且全面的数据,预计每年的数据量将达到数百万小时。
在拥有海量原始数据后,如何高效处理并转化为模型可用的有效数据?戴盟与阿里云合作开发了全链路的自动化数据处理引擎,利用强大的计算资源和算法来提高操作轨迹精度,并将触觉与其他模态(如视觉、动作指令)精准融合。
【从开放共享到制定标准】

Daimon-Infinity 的发布不仅仅是一次常规的产品更新。
此次数据集的建设由戴盟主导,联合了包括 DeepMind、中国移动、新加坡国立大学等在内的多家国内外顶尖学术机构和企业共同参与。此举旨在通过全球化的研发力量推动具身数据生态系统的发展。
开源10000小时的数据不仅是一次行业内的资源共享行动,还标志着行业内对于大规模触觉数据探索的开端,有助于建立统一的技术标准。
Daimon-Infinity 的开放共享将为具身智能从实验室走向实际应用奠定高质量的基础,并显著缩短实现精确操作、增强泛化能力以及商业化落地的时间。这或许意味着未来的机器人技术离现实应用更近一步了。
Daimon-Infinity 的数据开源,将为具身智能打造从实验室走向产业的高质量数据底座,大幅缩短具身智能实现精细操作、提供泛化能力、走向商业化落地的周期。具身智能在现实落地的那天,可能会更快到来。