今年最令人惊艳的机器人演示来了!
 henry
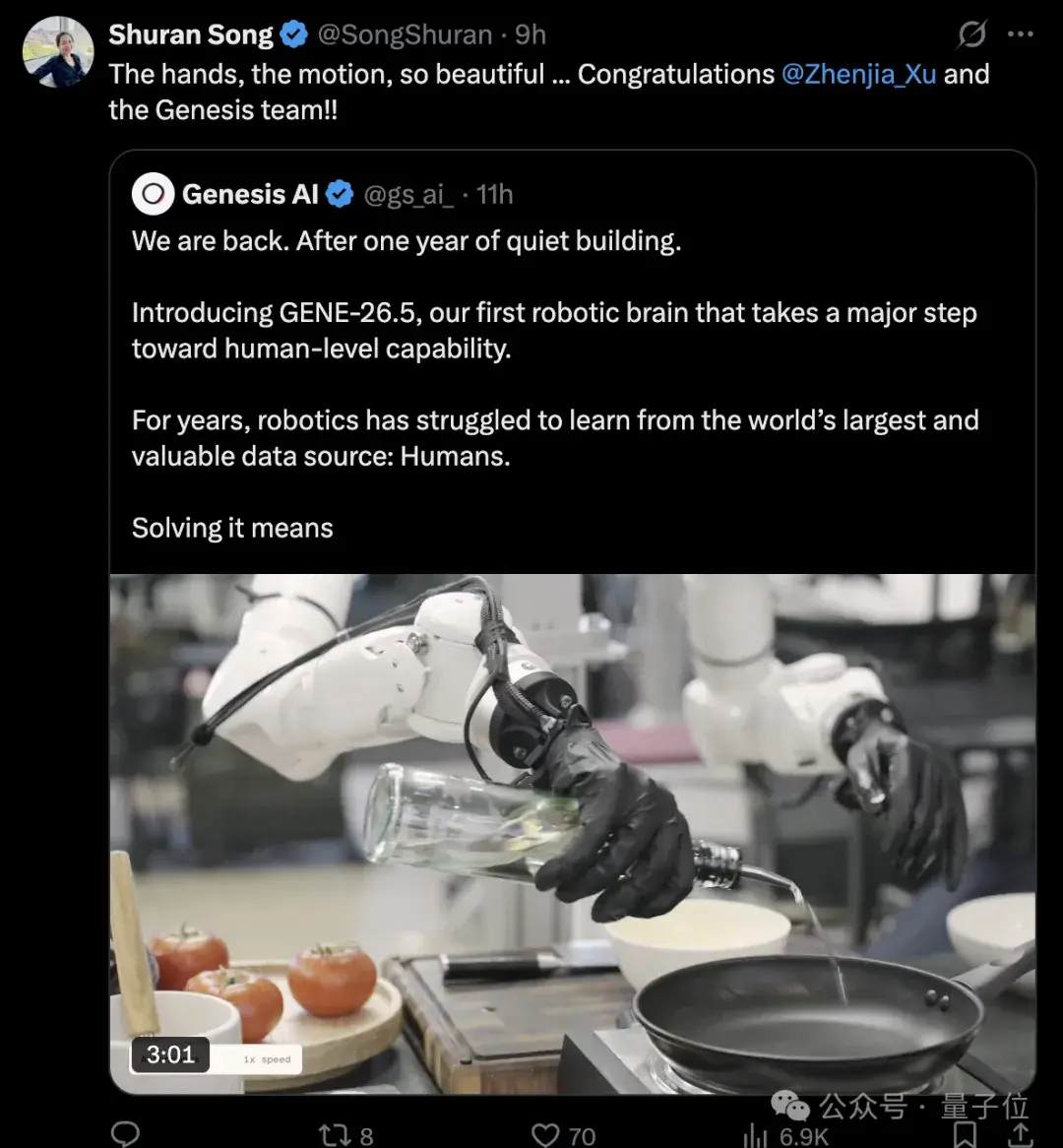
henryGenesis AI团队斥资一亿美元打造种子轮项目,单个模型实现了多项技能。
观赏者无不为之震撼,因为这可能是迄今为止最引人注目的机器人展示。
机器人的各项操作均为同一模型独立完成,全程无需人工干预。
GENE-26.5的推出引起了业界的关注,包括前1x副总裁Eric Jang和宋舒然教授在内的多位专家对此表示赞赏。
这个团队在过去一年中取得了令人瞩目的成就。一年多以前,他们在GitHub上发布了震惊网络界的Genesis物理引擎。
该引擎仅用一句话就能生成复杂的物理场景,获得了28.6k的星标,并吸引了大量学术界人士的关注和参与。

成立于2025年的Genesis AI,在中拿到1.05亿美元种子轮融资后,团队在研发上投入了相当多的时间。
今年展示的机器人示范无疑是该领域最值得关注的作品之一。让我们快速了解GENE-26.5的主要功能。
四分钟内完成二十个子任务,包括单手打鸡蛋和五指协调控制裂纹走向等复杂操作。
在切番茄的过程中,一只手调整角度,另一只手下刀,并使用毛巾、盐罐、打蛋器等多种工具连续作业。
现在回来了。
机器人在完成一系列精细动作后,还会用毛巾擦手,显示出一定的清洁习惯。
完整的实验过程展示了抓取移液器和装离心机等复杂任务的能力,精度达到毫米级,并且可以在空中翻转双臂进行实时反馈调整。
烹饪场景
Genesis AI宣称这是首个通用双手系统实现不依赖专用夹具解开魔方的成就。
该模型能够处理固态、可塑形和流体等多种物体,展示了其强大的适应性和灵活性。
当涉及到极为脆弱且透明的物品时,机器人可以做到多根手指高度同步操作。
实验室移液操作
在一个任务中同时抓取四种不同尺寸的对象,并以四种不同的方式握持,充分展示出与传统夹爪相比的优势。
解魔方
双手操控柔性线缆打捆、挂架及缠胶带等复杂工业任务的完成,展示了其在制造业中的巨大潜力。
针对快速节奏的挑战性操作,GENE-26.5能够以超过每分钟一百三十次的速度进行精确控制。
做冰沙
模型仅需不到一个小时的任务专用机器人数据就能掌握大部分复杂技能,显示出高效的学习能力。
吸管翻转
Genesis CEO周衔在接受Business Insider采访时透露了机器人的成功率和操作速度等详细信息。
多物体抓取
在博客中,Genesis明确表示操控技术不仅仅是模型训练的问题,而是一个系统工程问题。任何环节的短板都会影响整个系统的性能。
线束整理
因此他们决定从硬件到软件各个层面进行自主研发。
弹钢琴
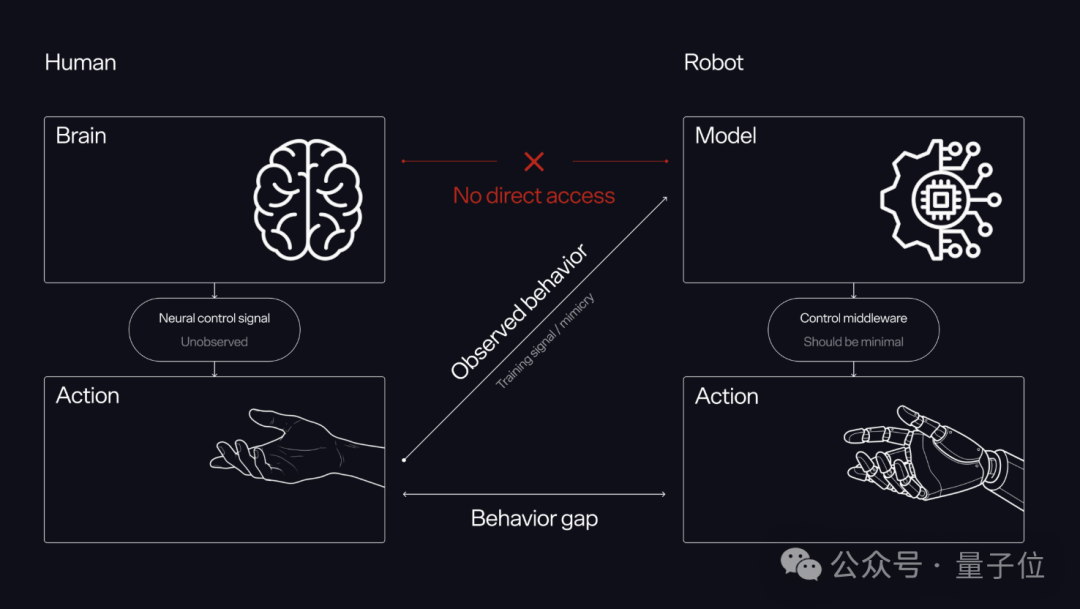
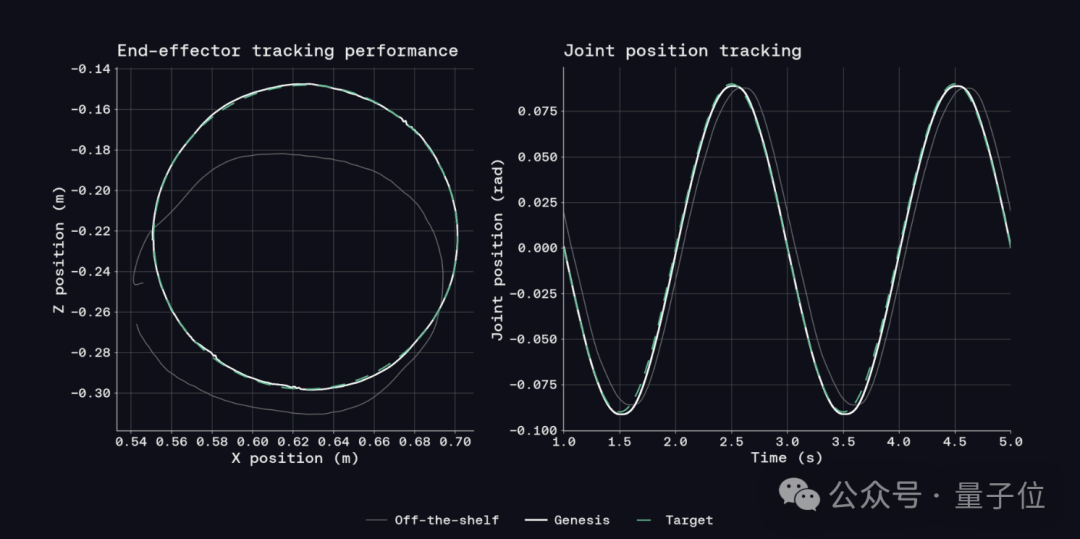
机器人手部设计与人类手指大小一致,具有二十个反向驱动自由度,并且覆盖柔软材料以模拟皮肤接触力学特性。
这种设计使得人类动作可以直接映射至机械手上,简化了控制算法的复杂性。
Genesis使用与其灵巧手配套的数据采集手套来收集工作中的手指运动数据,这些数据直接反映了真实操作情况。
数据引擎分为三层来源:最高保真度的手部运动和触觉信号、第一人称视频捕捉自然行为以及第三人称互联网视频提供广泛覆盖。
全栈怎么做的
Genesis总裁Gervet表示员工在进行日常操作的同时可以轻松地收集训练机器人所需的数据。
当被问及工人是否会愿意戴手套和摄像头时,他表示这需要根据具体情况与雇主协商决定。
GENE-26.5的模型旨在学习一种能够吸收语言、视觉、本体感觉、触觉以及动作数据的统一模型。
模型通过flow matching技术对轨迹进行联合分布建模,并能灵活地融合预训练模型的知识。
这一设计使得单一模型可以处理所有任务,包括控制、状态估计和目标推断等操作。

Genesis团队的博客中揭示了他们采用大规模闭环仿真环境来评估模型性能的关键信息。
通过这种方式,Genesis能够以极高的保真度直接在虚拟环境中测试实际世界中的训练模型。

在精细调整阶段,他们为机器人设计了一系列前所未见的新任务,在仅使用少量数据的情况下进行测试并获得良好效果。
周衔对TechCrunch表示,仿真技术极大地加速了他们的研发流程。
Genesis AI的发展历程从开源物理引擎到通用机器人的全栈解决方案,体现了其在机器人领域的全面布局。
2024年底,CMU的博士生周衔主导发布了Genesis物理引擎,迅速成为最大的具身智能项目之一。
随后,团队于2025年初注册成立,并由周衔担任CEO,总裁Théophile Gervet同样来自CMU,在Skild AI和Mistral AI有过研究经历。
两人师从Katerina Fragkiadaki教授,共同推动了Genesis AI的发展。
在获得1.05亿美元的种子轮融资后,团队投入大量时间搭建全栈系统,并迅速扩展到了60人规模,形成了巴黎、加州和伦敦三地协同工作的格局。
目前,该公司已经积累了超过二十万小时的多模态数据,并正在与多个行业客户洽谈合作事宜。
周衔表示,公司未来将推出首个全身通用机器人模型,展现更全面的能力。
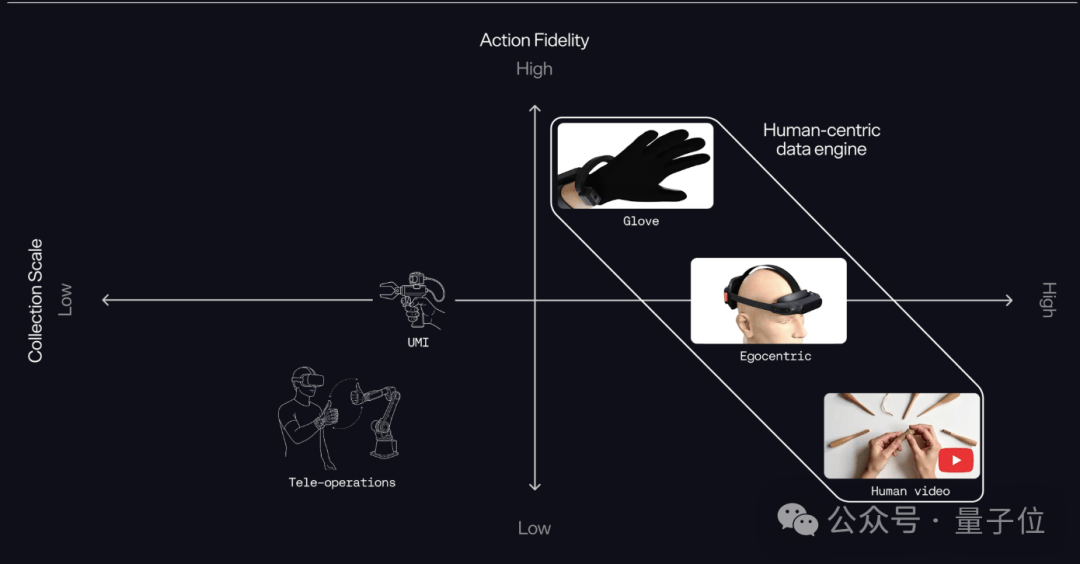
手套数据提供最高保真度的手部运动和触觉信号。第一人称视频捕捉自然行为和任务多样性。第三人称互联网视频提供海量覆盖。
三层数据在质量和规模上做了帕累托分布,Genesis和合作伙伴已经收集了超过20万小时的多模态数据。
Genesis总裁Gervet对TechCrunch说了一句有意思的话,这只手套可以让实验室技术员、制造业工人在干日常工作的时候顺便采集数据,不打断工作流。
当然TechCrunch也追问了一个尖锐的问题,工人会愿意戴着手套和摄像头来训练最终可能取代自己的机器人吗?
Gervet的回答是,这个得看客户和员工之间怎么谈,具体细节还没敲定。
模型,一个统一的轨迹联合分布
GENE-26.5的模型目标是学一个能同时吸收语言、视觉、本体感觉、触觉和动作的统一模型。用flow matching对轨迹建模联合分布,捕捉多模态的未来可能性。
几个关键设计。
第一,支持异构、部分可观测数据的可扩展训练,第一人称视频流、手套数据、机器人控制数据、互联网视频,不需要显式对齐就能一起训练。
第二,同一个模型处理所有任务,控制、状态估计、逆动力学、目标推断都变成对联合分布的条件查询,缺失的模态通过去噪推断。
第三,可以灵活吸收预训练模型的先验,VLM提供语义理解,世界模型提供时序和物理动态。
简单说就是一个模型吃所有模态的数据,做所有类型的任务。demo里展示的几个场景,除了钢琴演奏是单独用RL训练的之外,其余全部共享同一套权重。
训练和评估,仿真是加速器
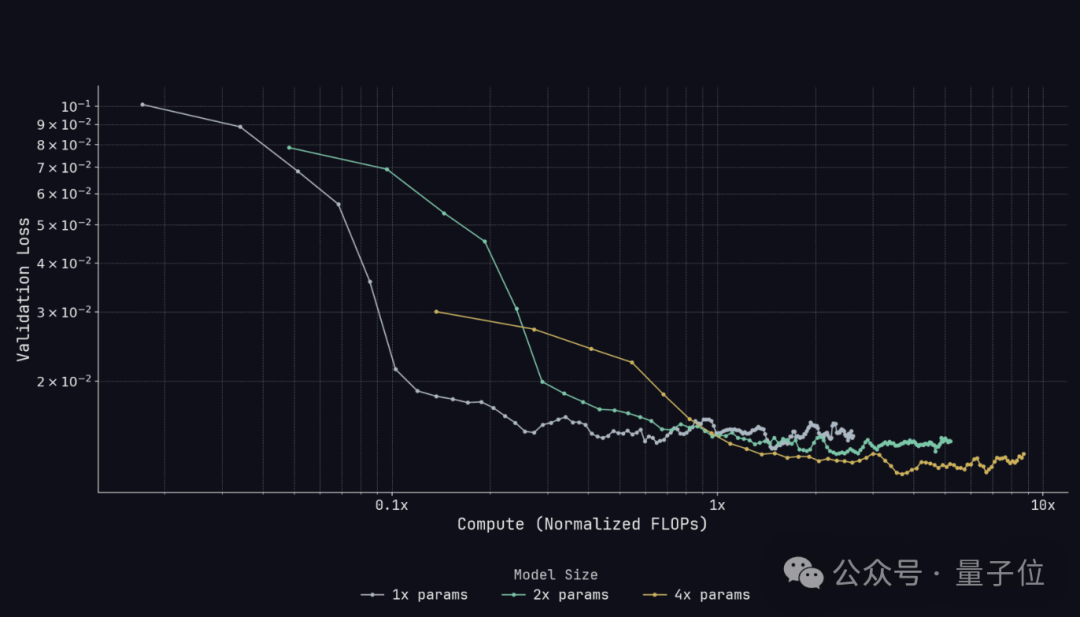
Genesis团队在博客里放了三张scaling曲线,透露了训练recipe的关键信息。
预训练阶段,open-loop评估显示模型规模和计算量增加时验证损失持续下降,符合经典的scaling law。
但他们强调open-loop指标对机器人来说远远不够,关键是closed-loop表现,就是模型的动作会影响后续观测的闭环场景。
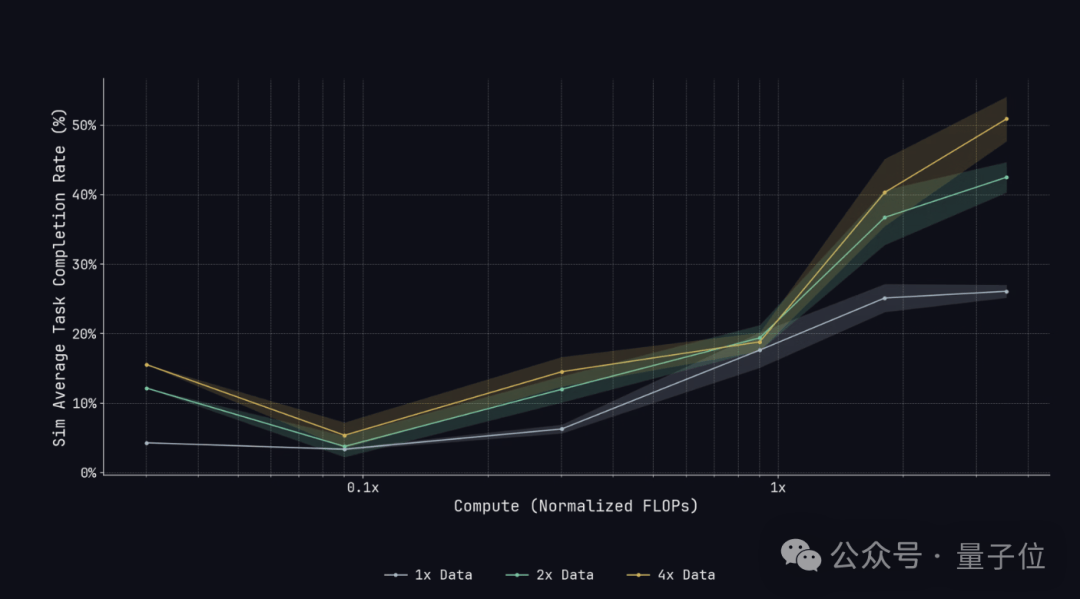
这里Genesis物理引擎的老本行就派上用场了。他们用最新版Genesis World仿真器做大规模闭环评估,不需要在仿真数据上做任何co-training,仿真环境的保真度已经足够直接评估真实世界训练的模型。
每个数据点对应200个评估设置和超过150小时的机器人执行时间,整张图如果在真实世界跑需要2700个人-机器人小时。结论是预训练数据量越大,zero-shot泛化能力越强。
到fine-tuning阶段回到真实世界。他们专门构造了预训练中完全没见过的新任务,在超低数据量条件下测试,每个任务只用20到30分钟的数据。
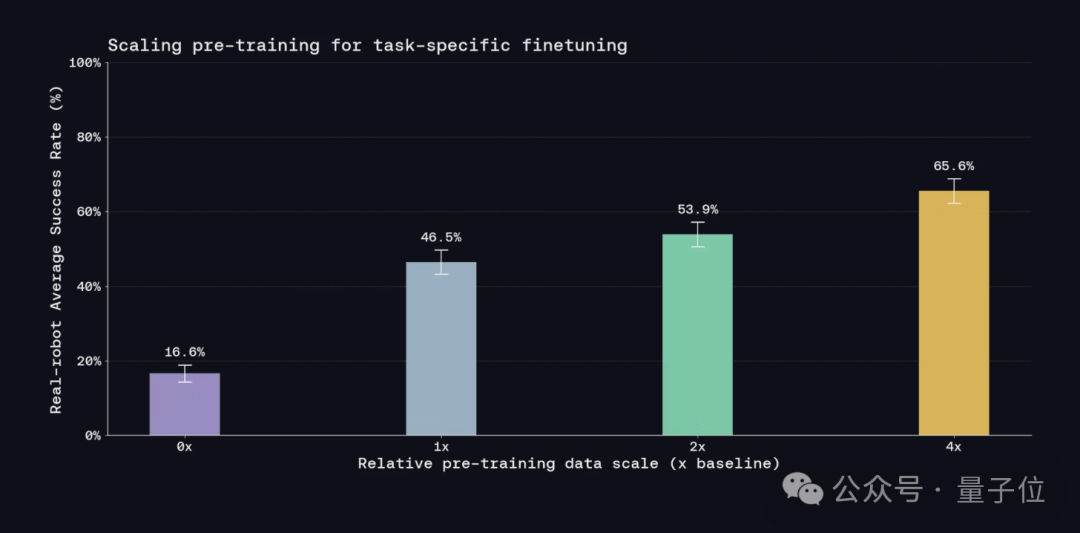
demo里展示的那些复杂技能,大多数只需要不到1小时的任务专属机器人数据,换算下来不到200个episode。预训练规模越大,fine-tuning也越快、数据需求越少、最终表现越好。
周衔对TechCrunch说,模型迭代速度的真正瓶颈是评估,仿真帮他们大幅加速了这个循环。
从物理引擎到通用机器人
2024年底,CMU博士周衔牵头开源了Genesis物理引擎。
这款纯Python仿真平台比英伟达Isaac Gym快10到80倍,GitHub上迅速成为最大的具身智能开源项目,吸引了20多个研究机构参与。
周衔本科毕业于新加坡南洋理工,是Genesis物理引擎的发起人。

2025年初,Genesis AI在法国注册成立,由周衔担任CEO,总裁是Théophile Gervet,同样来自CMU,曾在具身智能独角兽Skild AI任早期研究员,后加入Mistral AI做研究科学家。

两人师出同门,导师都是Katerina Fragkiadaki。
成立几个月后,团队拿到1.05亿美元种子轮,Eclipse和Khosla Ventures领投,谷歌前CEO Eric Schmidt、法国电信大亨Xavier Niel个人参投,法国国家投资银行Bpifrance也在投资方名单里。
作为参考,此前具身智能赛道最大的种子轮是Physical Intelligence的7000万美元。
拿到钱之后,团队没有急着发产品,而是花了将近一年时间闷头搭全栈。
今天,GENE-26.5。模型、硬件、控制栈、仿真器,一次性全部亮相。团队从创始时的几个人扩展到60人,巴黎、加州、伦敦三地办公,欧美大约四六开。已经收集了超过20万小时的多模态数据,正在与多个行业客户洽谈合作。
周衔告诉TechCrunch,接下来很快会公布第一个通用机器人,全身的,不只是手。
参考链接
[1]https://x.com/gs_ai_/status/2052050956272230577
[2]https://x.com/zhou_xian_/status/2052051823742312861
[3]https://www.aol.com/articles/look-hands-genesis-ai-says-130001205.html
[4]https://github.com/Genesis-Embodied-AI/genesis-world
[5]https://www.genesis.ai/blog/gene-26-5-advancing-robotic-manipulation-to-human-level
[6]https://techcrunch.com/2026/05/06/khosla-backed-robotics-startup-genesis-ai-has-gone-full-stack-demo-shows/