它石智航近日推出了一款名为“AWE3.0”的通用具身大模型,该模型能够实际应用于工业操作领域。
 林樾
林樾机器人在工业环境中执行任务的时刻已经临近。
在“它石智航具身通用大模型AWE3.0暨数据解决方案 SenseHub 发布会”上,它石智航首席科学家丁文超博士宣布,这款大模型助力它石A1机器人取得了中国首个具身智能领域的吉尼斯世界纪录。他强调,AWE3.0是全球首个能够进行实际作业的通用具身大模型,它具备完成复杂物理世界任务的能力。

AWE3.0:五大功能全面提升,构建“实用”的大模型
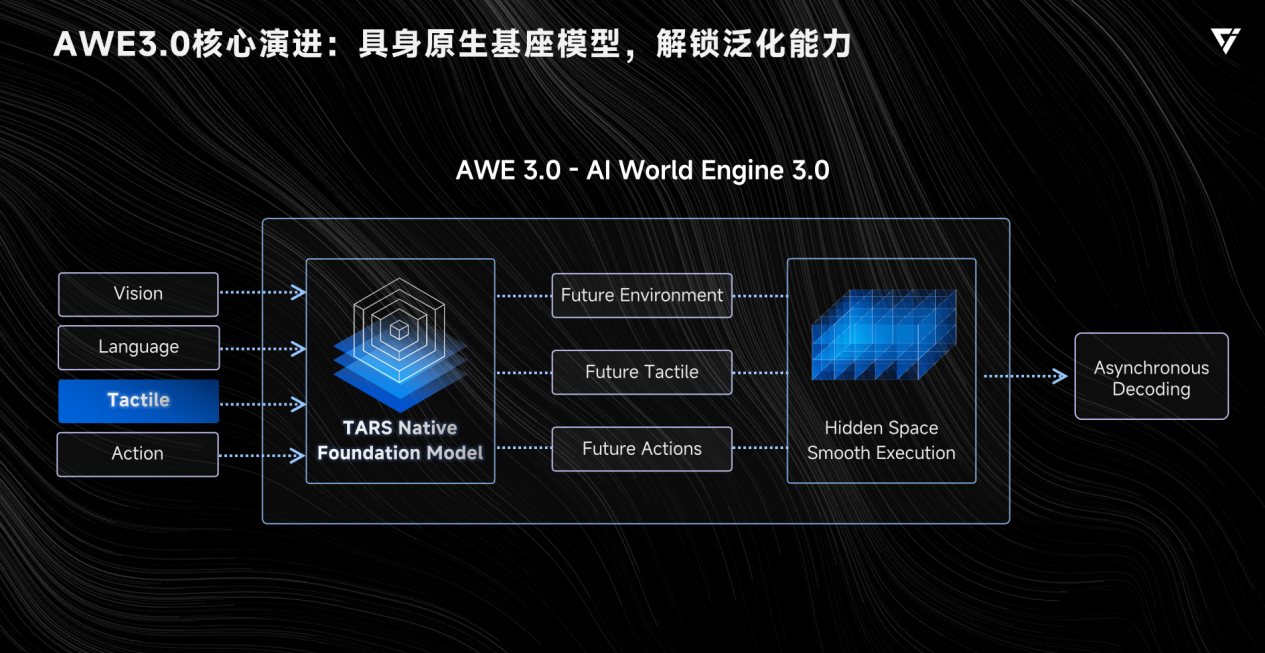
它石推出的AWE3.0通用具身大模型,具有走出实验室、实际操作、广泛适用的特点,实现了精细操作、智能感知控制、长期任务稳定执行等多项性能突破。

AWE3.0具备两项成熟能力提升和三项核心技术突破:一方面,它继承了端到端学习和时空推理等核心优势;另一方面,它通过全新的全视角通感决策OSD技术,摆脱了视角依赖,使机器人在未知视角下的任务成功率提高了三倍,确保了其在真实环境中的稳定作业;此外,通过WIYH数据集的丰富触觉数据,AWE3.0显著提升了机器人的触觉感知能力,使其实现了毫米级的精细操作,具备更强的泛化能力;最后,AWE3.0还采用了隐空间丝滑动作技术LAS,大幅提升了任务执行的流畅度,减少了抖动,使机器人能够在精密装配和柔性制造等场景中发挥出色表现。
AWE3.0的问世,标志着具身智能技术在实际应用中的重要一步,为未来的广泛应用打下了坚实的基础。
全视角通感决策OSD:应对未知,游刃有余
传统的机器人在面对未见过的环境时,难以稳定执行任务。而它石的AWE3.0则解决了这一难题,其全视角通感决策OSD技术让机器人能够基于世界状态自主决策,即使在未见过的新视角下,也能生成稳定的操作策略。实验数据显示,这一技术使机器人在未知环境下的任务成功率提高了三倍,显著增强了其在复杂环境中的泛化能力。
高密度触觉感知HTS:感知细微,触达精准
在需要高精度接触和柔性操作的场景中,触觉感知和反馈对于机器人至关重要。它石的高密度触觉感知技术HTS,基于WIYH数据集丰富的触觉数据,使AWE3.0能够深度理解抓取、装配、调整、擦拭、清洁、摆放等任务,并生成毫米级的细粒度动作,实现了对接触变化的灵敏且稳定的闭环调整,让机器人在精密装配和线束插接等场景中表现出色。

隐空间丝滑动作LAS:流畅自如,细腻如丝
AWE3.0通过隐空间丝滑动作LAS技术,解决了机器人动作执行中的抖动和卡顿问题,使操作轨迹更加流畅,抖动减少超过45%,提高了操作的稳定性和流畅度。结合世界对齐的隐动作空间,机器人能够实现毫米级精度操作,并在接近失败时自动恢复,支持复杂的长程任务执行。
AWE3.0继承了动态时空推理DSR的实时感知和精准预测能力,提升了空间描述精度和推理速度,使机器人能够实时理解环境并预测未来状态,具备假设推演的能力;结合全身端到端学习技术,机器人不仅能够识别物体的位置和形状,还能依据人类数据生成稳定的全身动作,实现从“理解”到“执行”的能力飞跃。
丁文超博士在发布会上介绍了它石全球首创的以人类为中心的数据采集方法和SenseHub数据采集套件,该套件融合了感知、计算和传输技术,实现了高质量的人类行为数据采集,为机器人提供了完整的系统级解决方案。它石自研的高精度全身运动捕捉算法,确保了复杂场景下全身关节点与姿态的毫米级精度跟踪和三维重建,并保证数据在移动过程中的稳定传输。
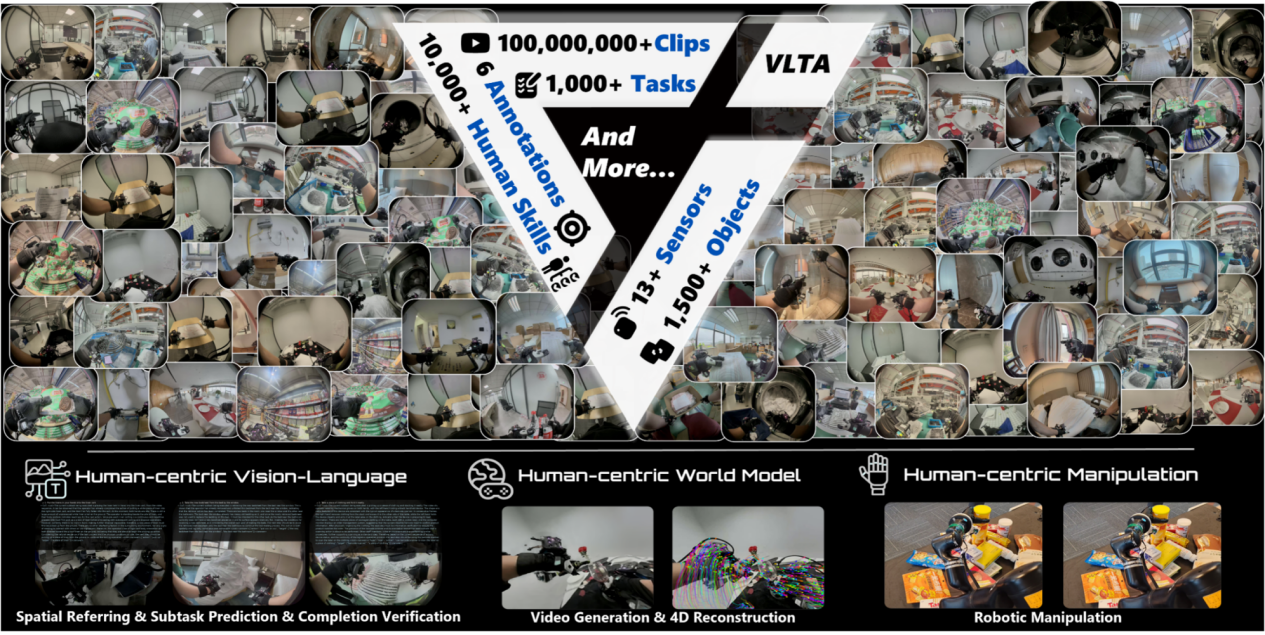
SenseHub还解决了多源异构数据同步的难题,实现了全身各类传感器间的微秒级时间同步,为后续数据融合与分析提供了统一的时序基准。此外,它石提供了一站式数据真值服务系统,从数据采集到管理分析,为高质量训练数据集的生成提供了全链条支持。
从技术革新到产业应用,全球首个AWE 3.0实现了全方位能力提升,推动具身智能技术在制造和服务等多元真实场景中的应用,开启了具身智能大脑规模化商用的新篇章。“打破能力边界,让机器人为世界带来更大价值。”
转载
本文为量子位获授权转载,观点仅为原作者所有。