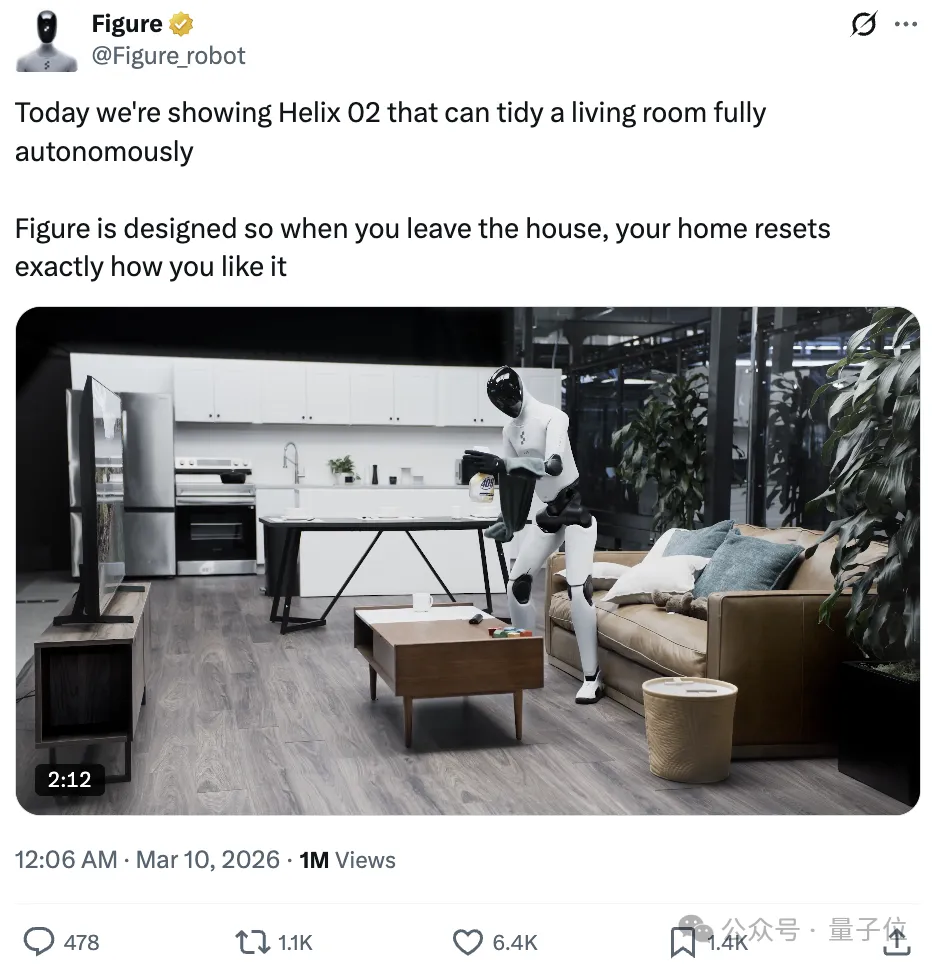
最近,价值达390亿美元的Figure公司发布了其最新成果,引起了网友们的广泛关注。
该公司的机器人能够独立完成客厅内物品整理的全过程。
它首先会用喷洒消毒液擦拭茶几(此举让人忍俊不禁):

接下来它将茶几和沙发上的杂物清理干净,并放入收纳桶中:
随后,机器人又把抱枕一一摆正位置:

最终,这个机器人甚至能够拿起遥控器并准确地按下关机键,并将其整齐摆放好:
看到这一系列流畅的操作,网友们纷纷要求团队尽快进行现场直播演示。

有人指出,让机器人移动物体相对容易,难的是要理解用户喜欢的物品排列方式。

据悉,这项技术突破的背后是Figure团队研发的具身大脑Helix 02系统。
就在一个月前,搭载该系统的Figure 03机器人已经在家用厨房场景中完成了从洗碗机取盘到放入橱柜的一系列自主操作:

在近4分钟的操作过程中,机器人始终没有重新启动或需要人为干预,一气呵成地完成了行走、抓取、搬运和放置等61个步骤。
此次解锁客厅整理新任务时,团队并未新增算法或进行特殊场景的工程适配,仅通过补充最新数据使Helix 02系统掌握了这一复杂日常任务。
Helix 02在发布后一个多月内实现了这一目标。它是一个单神经网络系统,能够直接控制机器人的所有动作,支持其在整个房间内完成灵活且长时间的自主任务。
更具体地说,Helix 02创造了一个统一视觉—运动神经网络——

这个一体化VLA模型整合了机载的所有传感器、视觉和触觉与本体感知,并直接连接到所有执行器上,使机器人可以将“感觉、思考、行动”视为一个整体过程。
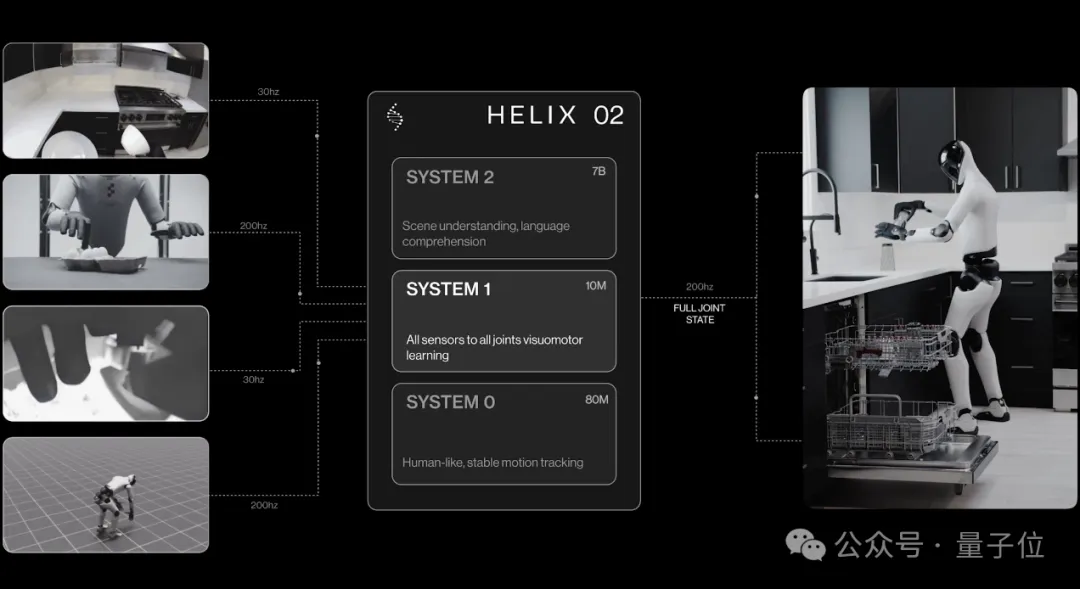
达成这一目标的关键是Figure在去年2月发布的Helix双(快慢)系统架构基础上添加了一个新的System 0,用于全身控制:
现如今,Helix 02形成了一套从像素到扭矩的紧密层级系统框架。
System 2:负责高层语义推理——理解场景并解析任务指令,将其拆解为一系列具体行为目标。
System 1:以每秒200次的速度快速思考,将感知结果转换为全身关节的目标动作。
System 0:以每秒1000次的频率执行,负责平衡、接触处理及整个身体协调行动。
System 0是一个基于人类运动数据训练的全身控制器,并结合了仿真到现实(sim-to-real)的强化学习技术。
它利用一个神经网络先验替代了手工编写的109504行C++控制代码,负责执行每一个动作时保持稳定、自然且可控。
- 从定位上看,System 0是一个面向人形机器人的全身控制基础模型,不局限于某一个具体动作。它学习的是人在保证平衡与稳定的前提下通常如何运动这一底层先验知识。
- 这也是Helix 02的物理具身核心所在——
- 当上层系统在规划“做什么”时,System 0确保身体能顺利、稳定地执行任务。
与传统做法中为行走、转向等分别设计奖励函数不同,System 0直接从大规模多样化的人类运动数据中学习整体跟踪能力。
在模仿这些动作的过程中,策略自然而然学会如何在各种行为间协调受力调整姿态并维持平衡,覆盖通用行走—操作所需完整的能力范围。
如果说System 0解决了全身动作执行时保持稳定的问题,那System 1则负责解决所有感知信息转化为可执行的全身动作的过程。
Helix 02中,System 1接入了全部传感器,并直接控制整台机器人:
输入包括头部摄像头、手掌摄像头及指尖触觉传感器和全身本体感知数据;
输出则涵盖双腿、躯干、头部、手臂乃至每一根手指的完整关节级控制。
这种从像素到全身(pixels-to-whole-body)的架构使System 1能够将机器人自身状态与环境视为一个强耦合的整体系统进行推理。
最后,System 2承担语义推理任务,负责处理场景理解、语言解析,并为System 1生成语义级隐式目标指令。
目前,Helix 02仅需补充新数据就能掌握需要融合移动能力、操作灵活性与环境感知的新任务。
- 总结本次演示,Helix 02不仅能在房间里自如行走,还能持续完成对各种物品、工具及容器的精准操控。团队强调,在没有研发新算法或进行特殊场景定制化开发的情况下,系统就已经掌握了以下技能:
- 协同使用喷壶和毛巾清洁表面:先用喷壶湿润脏污处,再用力擦拭以清除污渍。
动态操作柔性物品:灵活应对毛巾的复杂形态变化,将其从手臂上取下调整角度适配需求,并甩搭至肩头腾出双手。
完成复杂的双臂协同操作任务:双手端起收纳盒保持稳定,同时将桌上的积木舀入盒中。
通过全身协作策略提高效率:夹住收纳盒于腋下以腾出手捡拾玩具。
精确完成物体抛接动作:迅速而可控地将枕头扔回沙发。
- 在手中调整物品姿态执行精细任务:拿起遥控器后,在手中调整其朝向,准确按下关机键关闭电视。
- 移动过程中改变工具存放方式:在切换任务间隙时,暂时夹住毛巾于腋下以腾出双手进行操作。
- 精准控制步伐穿行狭窄空间:侧身穿过茶几与沙发之间的狭小缝隙,同时持续进行物品操控作业。
- 最后团队表示,随着执行任务的不断增多,Helix 02的功能库将不断扩大,最终有望实现人形机器人在家庭及办公场景中完成各类日常事务的目标。
- Figure公司成立于2022年5月,量子位之前也有所报道。创始人Bret Adcock是一位连续创业者,曾创办过一家电动飞机上市公司。
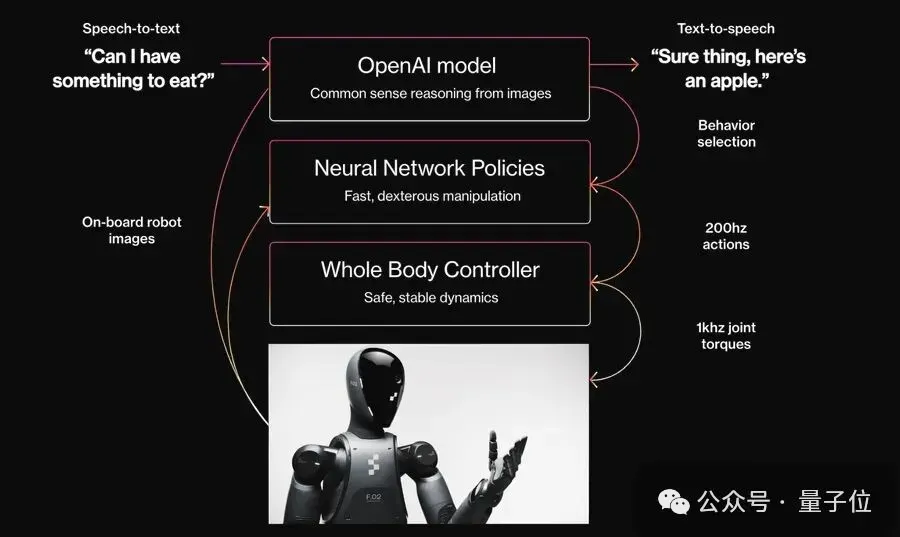
- 2024年3月,Figure发布了其首款机器人Figure 01,并与OpenAI建立了合作关系。
- 经过短短五个月的发展,第二代产品Figure 02问世。它配备了麦克风和扬声器模块,能够实现语音交互功能。
- 然而合作并未持续太久,去年2月,Figure宣布终止了与OpenAI的合作关系。据Techcrunch报道,双方在将AI模型集成到机器人硬件时存在分歧。
尽管如此,Figure的发展势头依然强劲。
自创立之初,该公司就备受科技巨头青睐,包括OpenAI、微软和英伟达等企业都对其进行了投资。去年九月,Figure完成了C轮融资,获得了超过10亿美元的承诺资本,估值攀升至390亿美元,创下目前公开信息中具身智能赛道最高纪录。
C轮融资由Parkway Venture Capital领投,英伟达继续加注,其他投资者还包括Brookfield Asset Management、麦格理资本等。

时隔仅5个月,第二代产品Figure 02亮相。依托与OpenAI的合作,这款机器人搭载了定制训练的AI模型,配备麦克风与扬声器模块,可实现与人类的语音交互功能。
不过合作并未持续太久,去年2月,Figure突然宣布与OpenAI解约。据Techcrunch报道,双方合作破裂的核心原因,在于AI模型与机器人硬件的集成环节出现分歧。
即便与OpenAI分道扬镳,Figure的发展势头依旧迅猛。
这家公司自创立之初就备受科技巨头青睐,OpenAI、微软、英伟达等企业均曾对其押注。去年9月,Figure完成C轮融资,斩获超10亿美元承诺资本,投后估值一举攀升至390亿美元,创下目前公开信息里具身智能赛道的最高估值纪录。
C轮融资由Parkway Venture Capital领投,英伟达继续加注,Brookfield Asset Management、麦格理资本、英特尔资本、Align Ventures、Tamarack Global、LG Technology Ventures、Salesforce、T-Mobile Ventures、高通风投等也都有参与。
参考链接:
[1]https://x.com/Figure_robot/status/2031038981333565949
[2]https://www.figure.ai/news/helix-02-living-room-tidy